Template:NoteTA
派克变换(也译作帕克变换,英语:Park's Transformation),是目前分析同步电动机及感應馬達运行最常用的一种坐标变换,由美国工程师Template:Le在1929年提出。派克变换将定子的a,b,c三相电流投影到随着转子旋转的直轴(d轴),交轴(q轴)与垂直于dq平面的零轴(0轴)上去,从而实现了对定子电感矩阵的对角化,对电动机的运行分析起到了简化作用。
定义
派克正变换:
逆变换:
派克变换也作用在定子电压与定子绕组磁链上:
,
几何解释
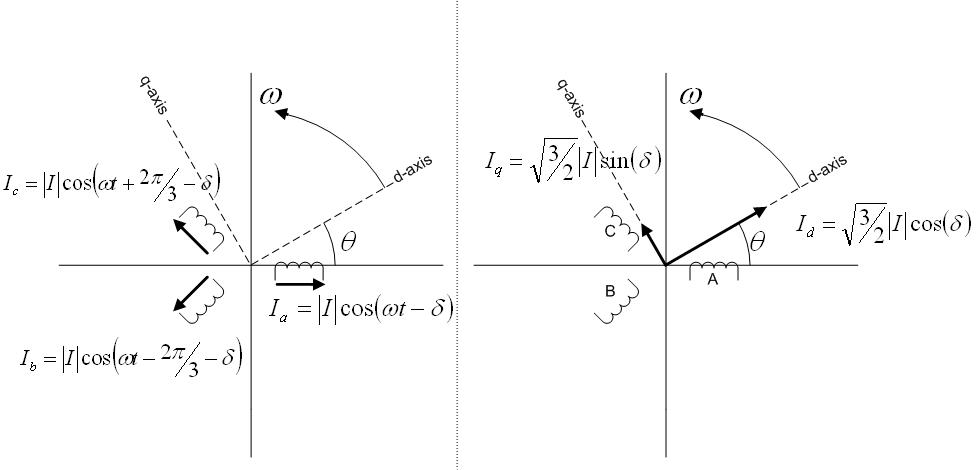 上图描绘了派克变换的几何意义,定子三相电流互成120度角,为定子电流落后于它们对应的相电压的角度。直轴与交轴电流分别等于定子三相电流在d轴与q轴上的投影。(图中的比例系数是由于图中所采用的是正交形式的派克变换)d-q坐标系在空间中以角速度逆时针旋转,故 以d轴领先a相轴线的方向为正。当定子电流为三相对称的正弦交流电时,,为直流电流,。
上图描绘了派克变换的几何意义,定子三相电流互成120度角,为定子电流落后于它们对应的相电压的角度。直轴与交轴电流分别等于定子三相电流在d轴与q轴上的投影。(图中的比例系数是由于图中所采用的是正交形式的派克变换)d-q坐标系在空间中以角速度逆时针旋转,故 以d轴领先a相轴线的方向为正。当定子电流为三相对称的正弦交流电时,,为直流电流,。
用派克变换化简同步发电机基本方程
变换后的磁链方程
磁链方程:
上式中的电感系数矩阵 事实上都含有随时间变化的角度参数[1],使得方程求解困难。
现对等式两边同时左乘 ,其中为三阶单位矩阵。方程化为:
其中 。
① 变换后的电感系数都变为常数,可以假想dd绕组,qq绕组是固定在转子上的,相对转子静止。
② 派克变换阵对定子自感矩阵 起到了对角化的作用,并消去了其中的角度变量。 为其特征根。
③ 变换后定子和转子间的互感系数不对称,这是由于派克变换的矩阵不是正交矩阵。
④ 为直轴同步电感系数,其值相当于当励磁绕组开路,定子合成磁势产生单纯直轴磁场时,任意一相定子绕组的自感系数。
变换后的电压方程
电压方程:
现对等式两边同时左乘 ,其中为三阶单位矩阵。方程化为:
由 ,
对两边求导,得 ,
所以
其中 ,令
于是有
上式右边第一项为绕组电阻的压降,第二项为变压器电势,第三项为发电机电势或旋转电势。
注释
- ↑ 定子电感矩阵 ,
其中
相關條目
参考书目
- 电机电子类科《电力系统暂态分析》,ISBN 978-7-5083-4825-4,作者:李光琦,中国电力出版社。
Template:電動機