電荷泵鎖相迴路
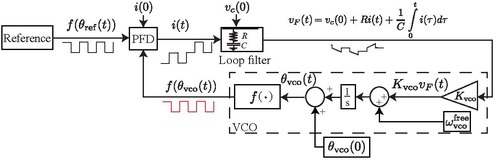
電荷泵鎖相迴路(Charge-pump phase-locked loop)簡稱CP-PLL,是一種鉴相器適用於方波輸入信號的鎖相迴路[1]。CP-PLL可以快速的鎖定到輸入信號的相位,可以達到很低的穩態相位誤差[2]。
鉴相器(PFD)
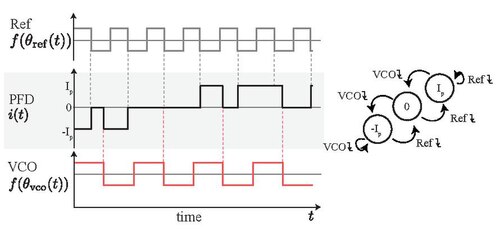
鉴相器(PFD)是由參考信號(Ref)以及受控輸出(VCO)信號的下緣所觸發。PFD 的輸出信號只有三個狀態:0, ,和。 參考信號的下緣會使PFD切換到較高的狀態,若PFD已經在就不會變動。 VCO信號的下緣會使PFD切換到較低的狀態,若PFD已經在就不會變動。 若二個信號的下緣同時出現,PFD會切換到0。
CP-PLL的數學模型
第一個二階CP-PLL的數學模型是由Template:Le在1980年提出的[2]。M. van Paemel在1994年提出了不考慮VCO過載(overload)的非線性模型[3],N. Kuznetsov等人在2019年優化該模型[4]。也有學者在推導考慮VCO過載的CP-PLL解析解數學模型[5]。
CP-PLL的數學模型可以針對一些參數進行解析的預估,例如hold-in範圍(在VCO沒有過載的情形下,可能進行鎖相的輸入信號頻率範圍),及捕獲範圍(pull-in range,在CP-PLL任意初始狀態下,CP-PLL最終可以鎖相的輸入信號頻率範圍)[6]。
二階CP-PLL的連續時間線性模型以及加德納的猜想
加德納的分析是以以下的近似為基礎[2]:每個參考信號的周期內,PFD非零的時間區間為
CP-PLL的PDF平均輸出為
對應的傳遞函數為
若用濾波器傳遞函數以及VCO傳遞函數,可以得到加德納的二階CP-PLL線性近似平均模型:
Template:Le在1980年以上述的理解,提出了猜想:「實際電荷泵鎖相迴路的暫態響應,預期會和等效傳統PLL的暫態響應幾乎相同。」[2]Template:Rp(加德納對CP-PLL的猜想)。 依照加德納的結果,也類似Egan在type 2 APLL捕獲範圍的猜想,Amr M. Fahim在其書中猜想[7]Template:Rp:為了要達到無限大的捕獲範圍,CP-PLL的迴路濾波器需要使用主動濾波器(Fahim-Egan在type II CP-PLL捕獲範圍的猜想)。
二階CP-PLL的連續時間非線性模型
為了簡化推導,但不失去通用性,假設VCO和參考信號在其相位為整數時為其下降緣。 令參考信號第一個下降緣的時間為。 PFD狀態會依PFD的初始狀態,VCO的初始相位移,以及參考信號的值而不同。
若利用電阻和電容製作純PI(比例積分)的濾波器,其輸入電流和輸出電壓的關係為
其中是電阻,是電感。 是電容器的電壓。 控制信號會調整VCO頻率:
其中是VCO的自由運行頻率 (也就是),是VCO增益(靈敏度)、是VCO相位。 最後,CP-PLL連續時間非線性數學模型如下
其中有以下的不連續分段常數非線性
初始條件為. 此模型是非線性、非自主式、不連續的開關系統。
二階CP-PLL的離散時間非線性模型

假設參考信號頻率為常數: 其中、和是參考資料的週期、頻率和相位。
令, 這表示是第一個PFD輸出為0的時間 (若,則) 且是VCO或參考信號的第一個下降緣。 其且,可以定義對應的遞減數列、,其中。
令. 則在時,是非零的常數()。 令為PFD脈波寬度(PFD輸出為非零長度的時間區間)乘以PFD輸出的正負號:
- for
- for
若VCO的下降緣在參考信號的下降緣之前,則,反之,可得。可以看出二個信號下降緣的先後順序。在區間內,PFD輸出為零,PFD :
- for .
將變成下式的變數變換[8] 可以讓參數減至二個:
此處是正規化的相位偏移,是VCO頻率 相對於參考頻率的比例。
最後,不考慮VCO過載的二階CP-PLL離散時間模型如下[4][6]
其中
此離散時間模型只在有一個穩態,可以估計hold-in範圍和捕獲範圍[6]。
若VCO過載,也就是為零, 或者是以下的式子 或 , 則需要考慮額外的CP-PLL動態特性[5]。 針對任何參數,只要VCO和參考信號的頻率差夠大,就會使VCO過載。 在實務上,需避免VCO的過載。
高階CP-PLL的非線性模型
高階CP-PLL非線性模型推導和超越方程有關,無法求得解析解,需要用近似的方式計算[9]